Research — Teleoperation of ICU Ventilators
After the COVID-19 pandemic hit in March of 2020, I was unable to access the lab to continue my DALK work. As such, I pivoted to design and prototype a device that could help combat the pandemic: a tele-operated robot for remotely controlling Intensive Care Unit (ICU) ventilators. The project involved rapid design, prototyping, and coding, and eventually won the Innovation Award in the UK-RAS Medical Robotics for Contagious Diseases Challenge.
Given the general shortage of Personal Protective Equipment (PPE) at the beginning of the COVID pandemic, it became necessary for medical personnel to conserve existing supplies. However, in order to treat patients infected with COVID-19, respiratory therapists needed to don a complete protective suit to enter the ICU, make minor but necessary adjustments, and then discard the entire set. It was suggested that this waster could be massively reduced by allowing respiratory therapists to make routine adjustments remotely.
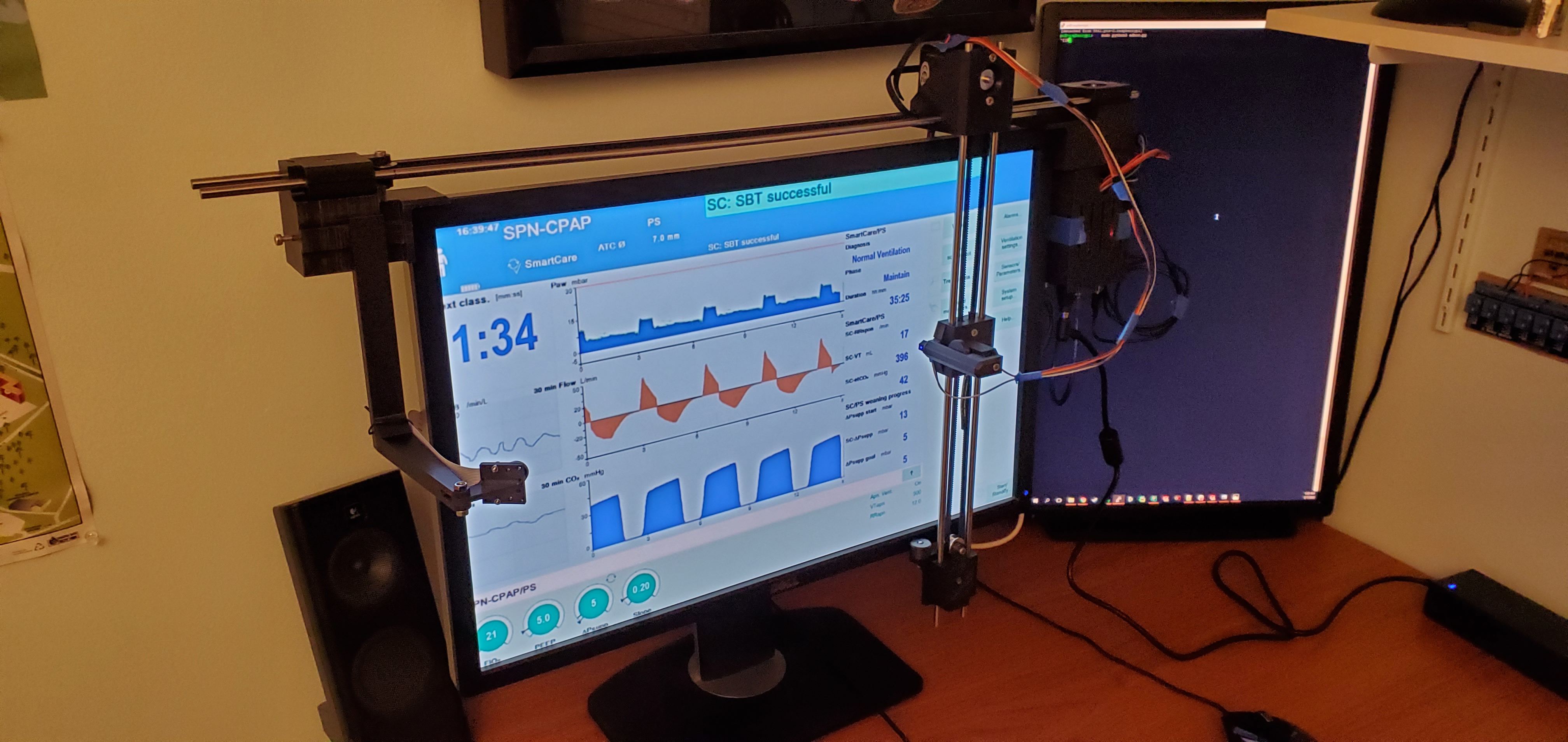
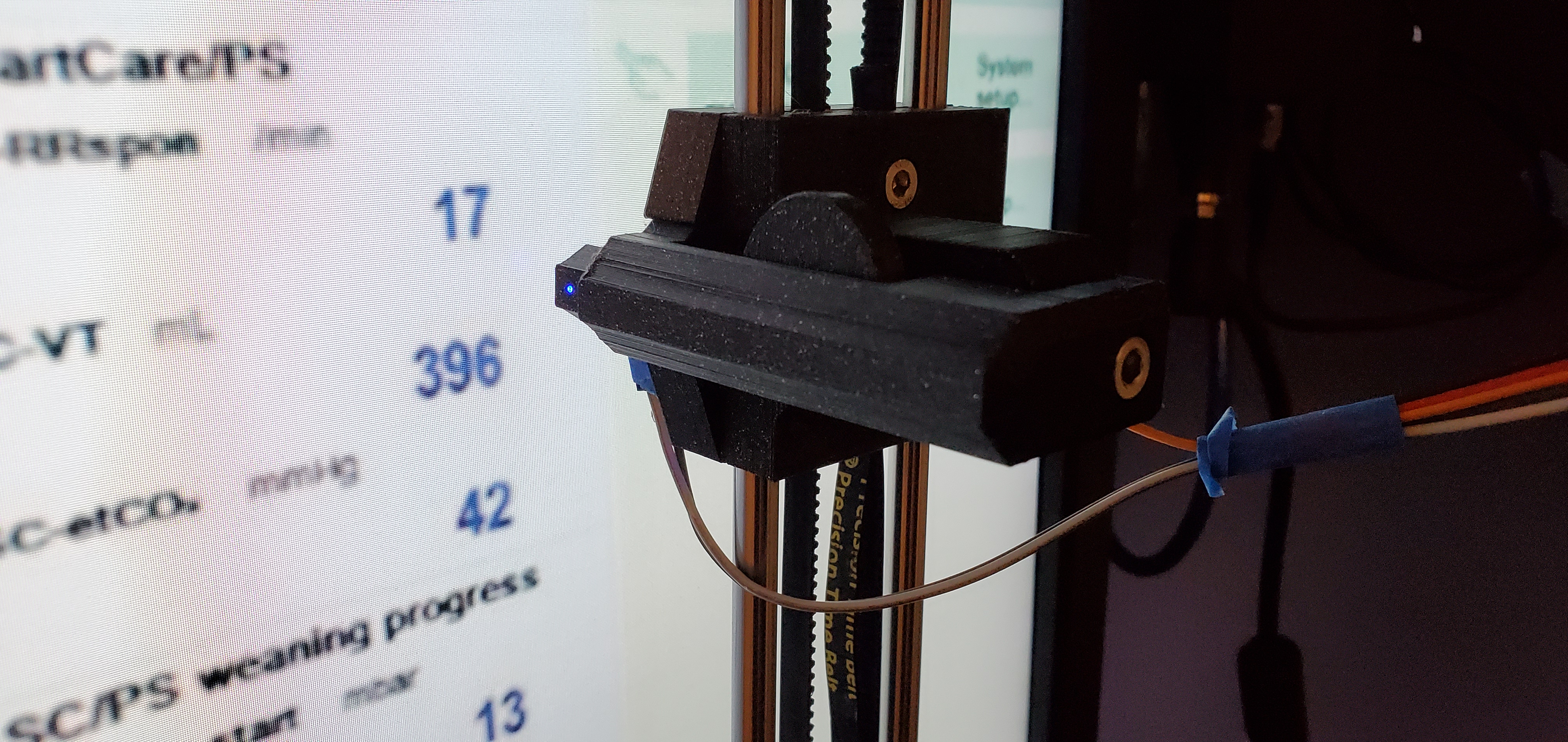
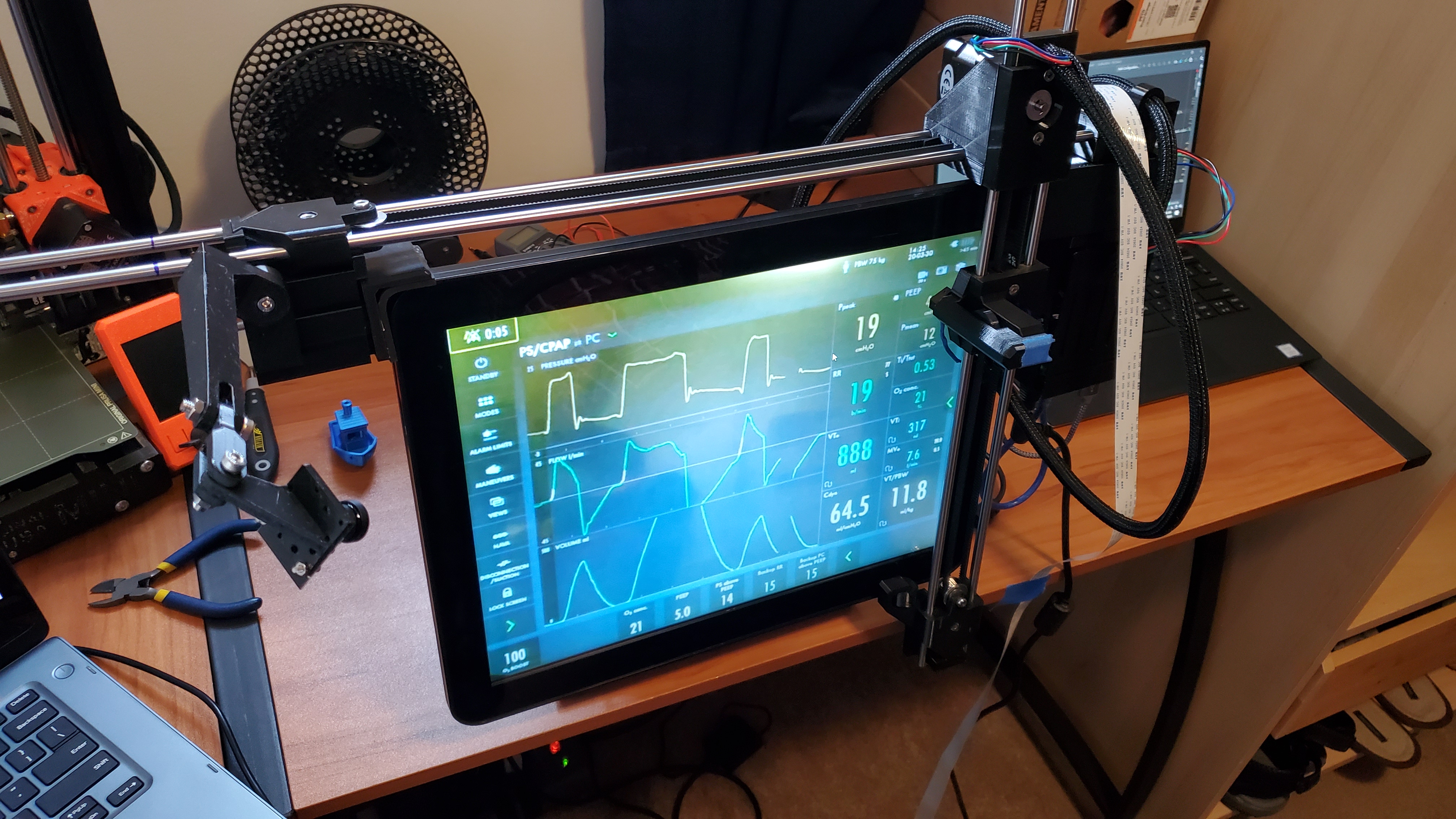
The first proposal for the project was made in early April. By late April I had designed and built a first prototype of a lightweight, cheap cartesian gantry that could mount to a screen and move to touch points. This was soon followed by revisions, the addition of a microcomputer and camera to perform visual servoing, etc.
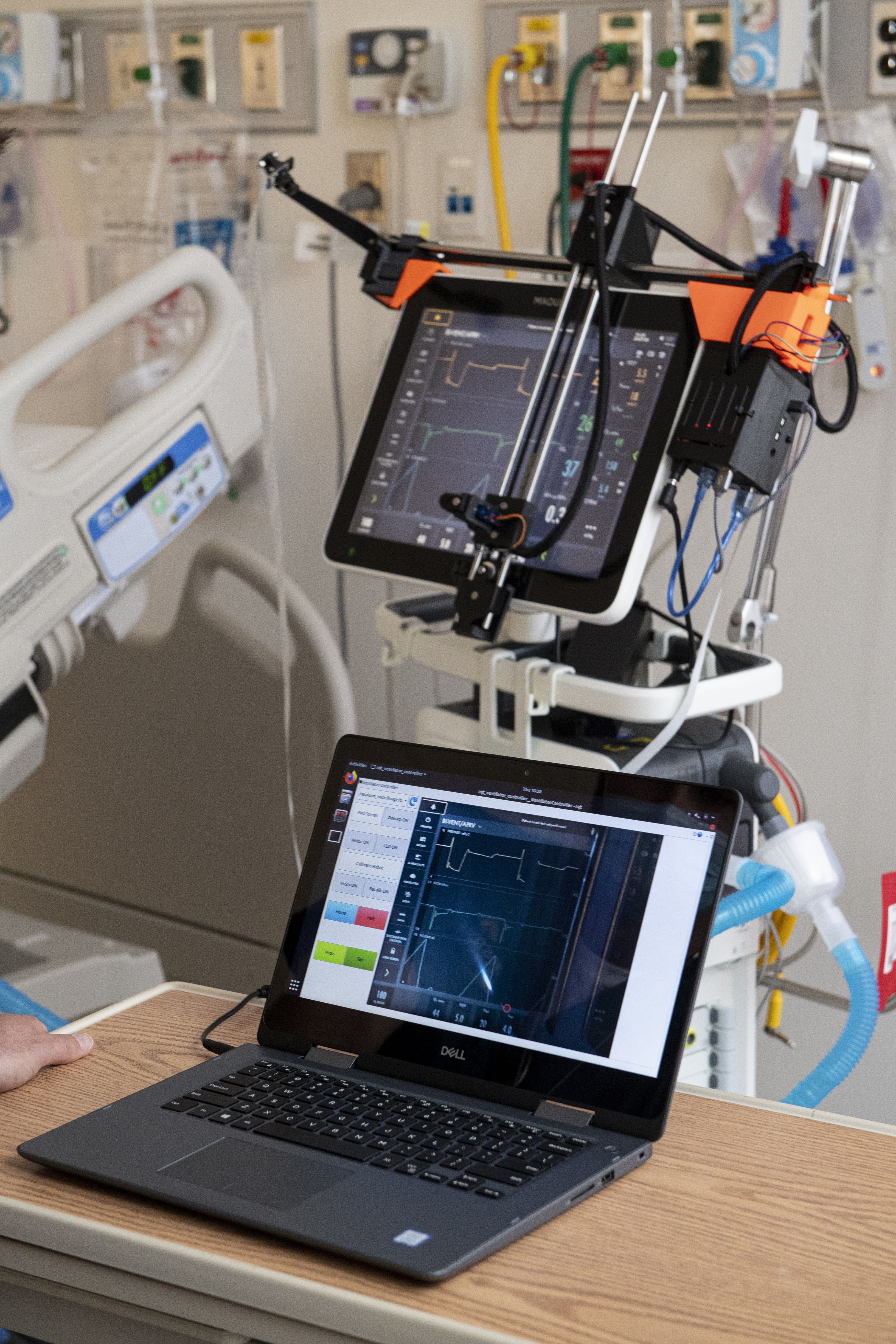
By August, the system was ready to be tested in the Bio-containment Unit (BCU) at Johns Hopkins University, and was assessed by a senior respiratory therapist for efficacy. Experiments were performed to compare the relative speed of making adjustments and performing other routing operations manually and using the robotic system, and the total time per procedure was recorded.

Images from within biocontainment unit courtesy of Johns Hopkins Hospital.
The system design and results were submitted to the journal Frontiers in Robotics and AI under the title "Telerobotic Operation of Intensive Care Unit Ventilators", and the resulting article, a presentation on which won the Innovation Award in the UK-RAS Medical Robotics for Contagious Diseases Challenge, can be found here.