While at the University of Maryland, I was a part of and helped lead Team Autocycle, a student research team working to design and build a self-driving bicycle. In order to make the Autocycle work, it needed a robust control system to allow it to balance itself and follow commanded trajectories. The control design and implementation was the primary task I applied myself to, learning linear system theory in the process, and developing my skills in writing complex robotic firmware in C++.
(Read More)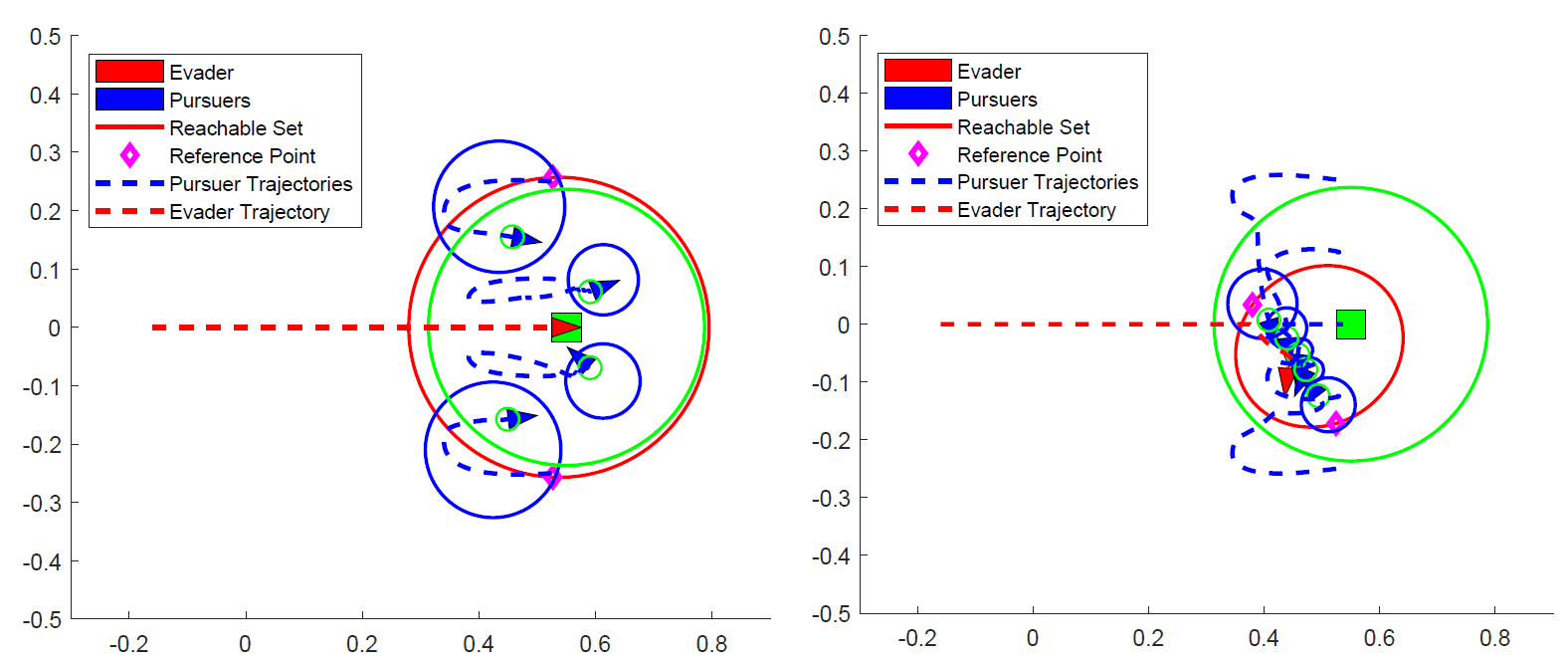
Starting in August of 2020, I worked as a student researcher with Dr. Yancy Diaz-Mercado of the UMD Collaborative Controls and Robotics Lab. In my work, I investigated the control of a team of pursuer agents so as to guarantee capture of a faster, lone evader agent. The work resulted in the development of an improved distributed pursuer control algorithm and a set of closed form expressions for the number of pursuers needed for the geometric feasibility of capture, as well as simulation and realtime implementation in MATLAB. The results were presented at and published in the proceedings of the 2021 Modeling, Estimation, and Controls Conference (MECC2021).
(Read More)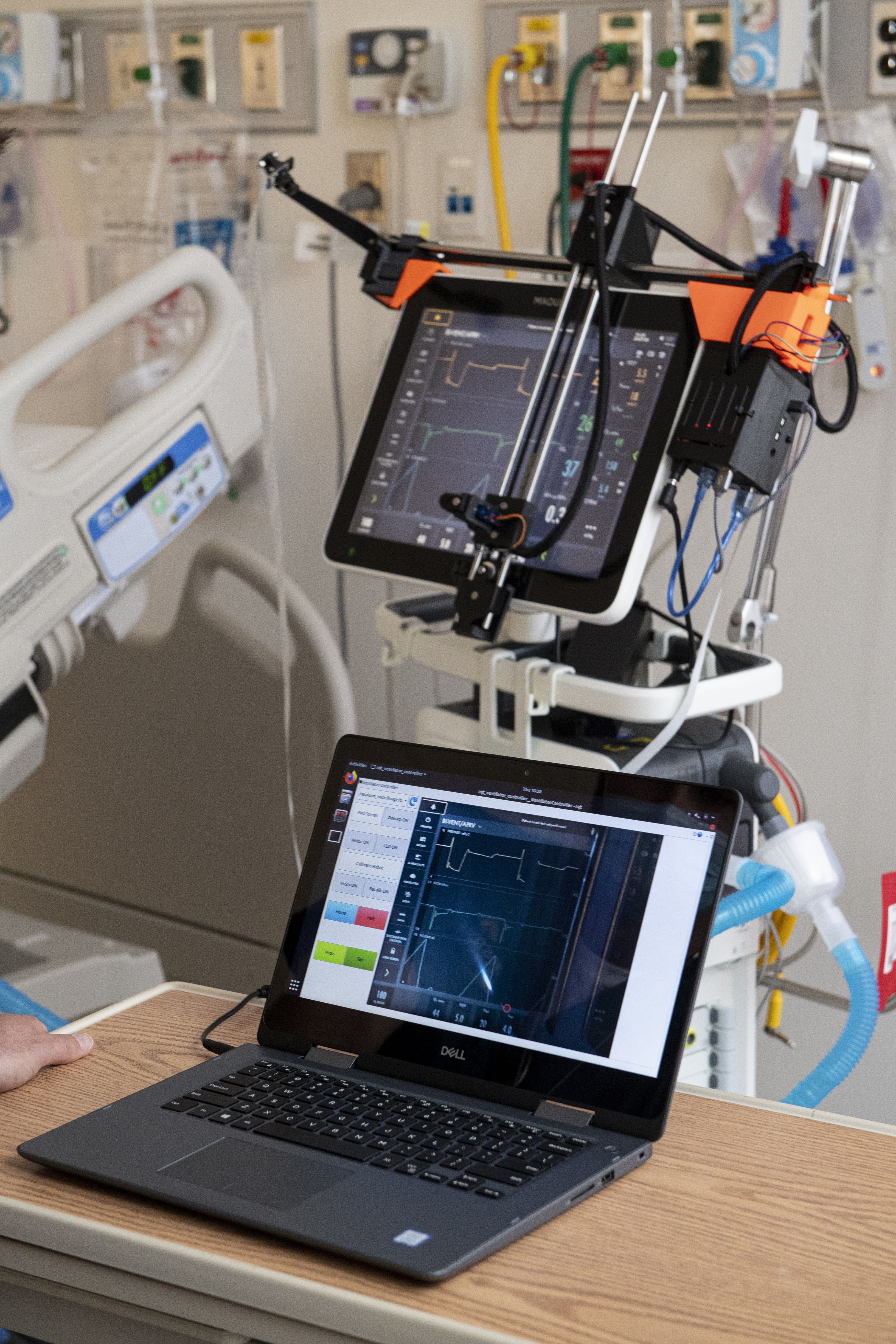
After the COVID-19 pandemic hit in March of 2020, I was unable to access the lab to continue my DALK work. As such, I pivoted to design and prototype a device that could help combat the pandemic: a tele-operated robot for remotely controlling Intensive Care Unit (ICU) ventilators. The project involved rapid design, prototyping, and coding, and eventually won the Innovation Award in the UK-RAS Medical Robotics for Contagious Diseases Challenge.
(Read More)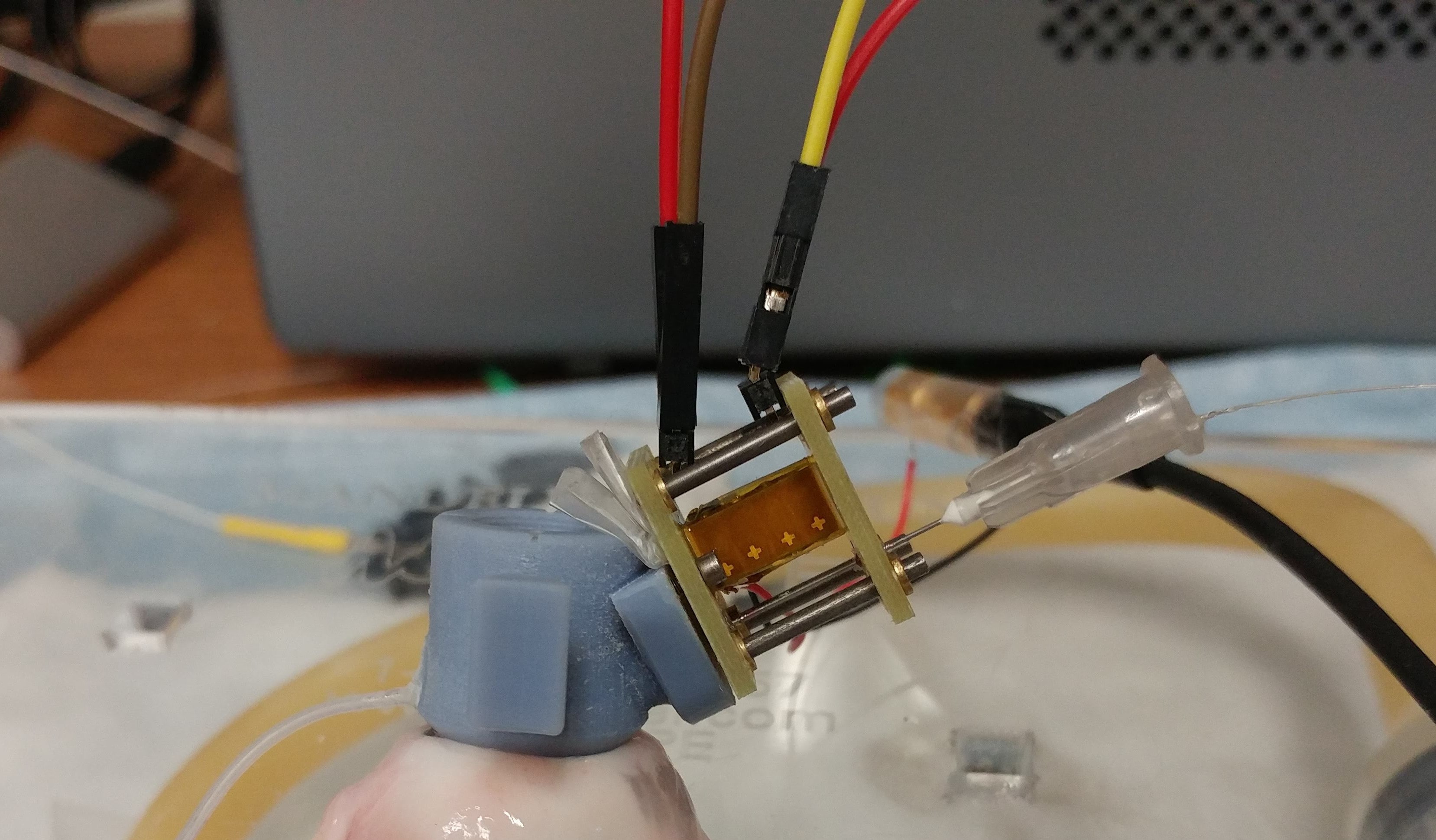
Starting in April of 2019, I began work with Dr. Axel Krieger of the Medical Robotics and Instrumentation lab at UMD on device for precisely robotically performing corneal transplants. Specifically, I worked on developing and validating a novel actuator for performing micro-positioning of a hypodermic needle as a part of the Deep Anterior Lamellar Keratoplasty (DALK) process. The results of this work were eventually presented at the 2021 International Conference on Intelligent Robots and Systems (IROS)
The device consisted of two printed circuit boards separated by a piezo-electric stack. Each board had a small via drilled through it, and in the via was set a nichrome wire coil coated in wax. The hypodermic needle passed through both coils, and by precisely alternating the cycle of heating and cooling the coils with the extension and contraction of the piezo-electric element, the needle could be inched forward by increments of 10 microns or less. While the principle was originally developed by Mladen Barbic of HHMI, we refined the device at larger scale for surgical application.
(Read More)