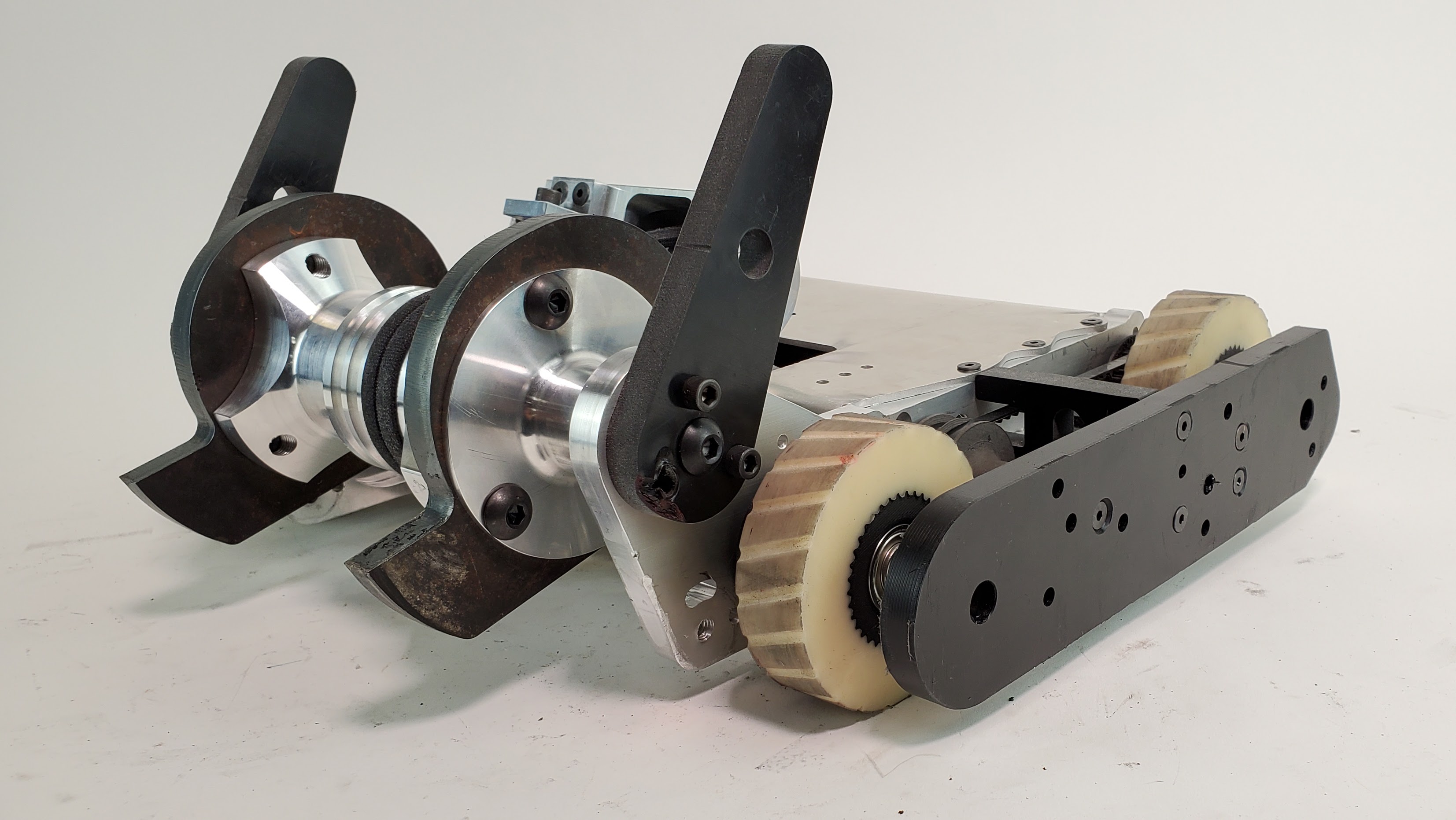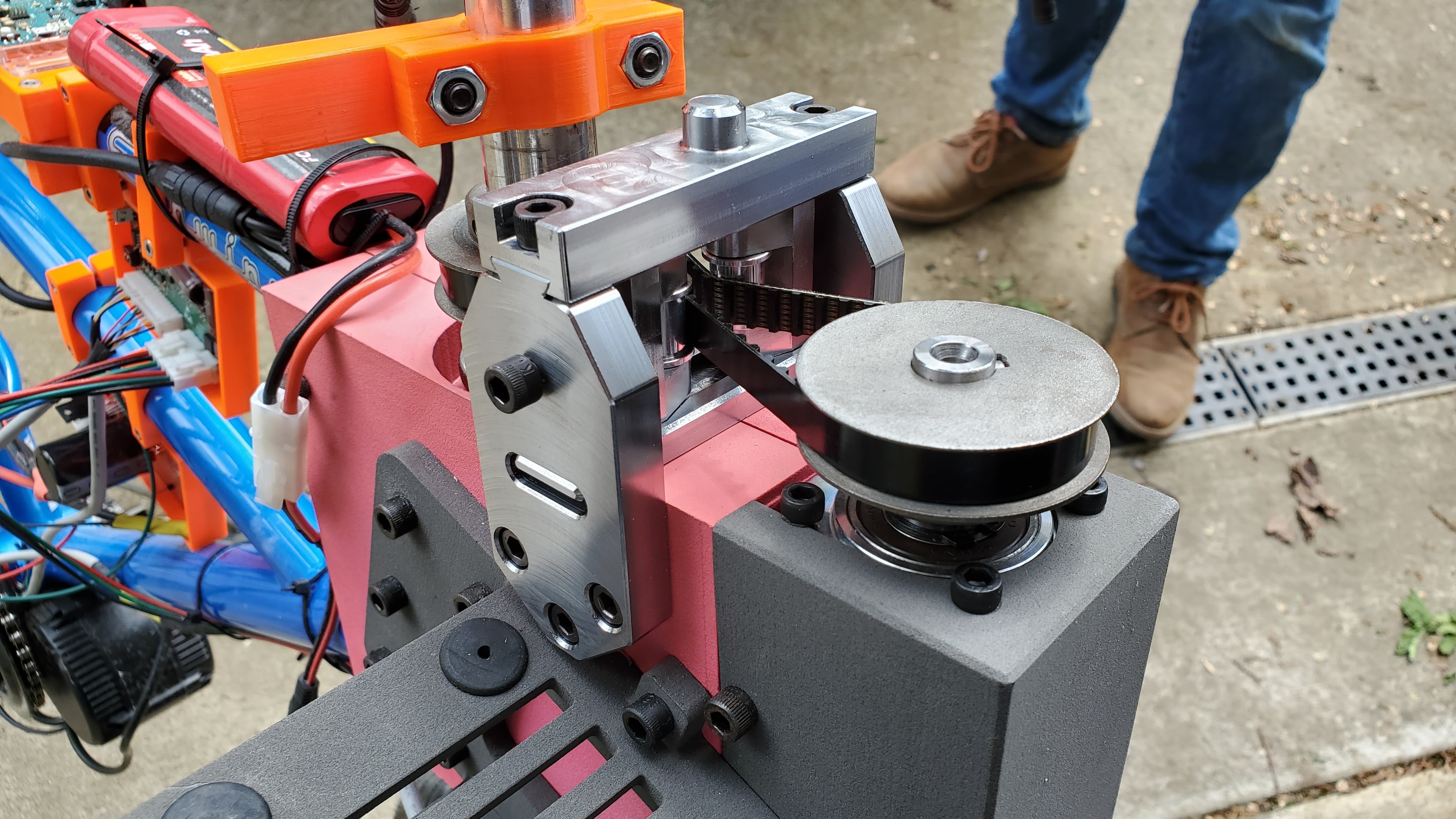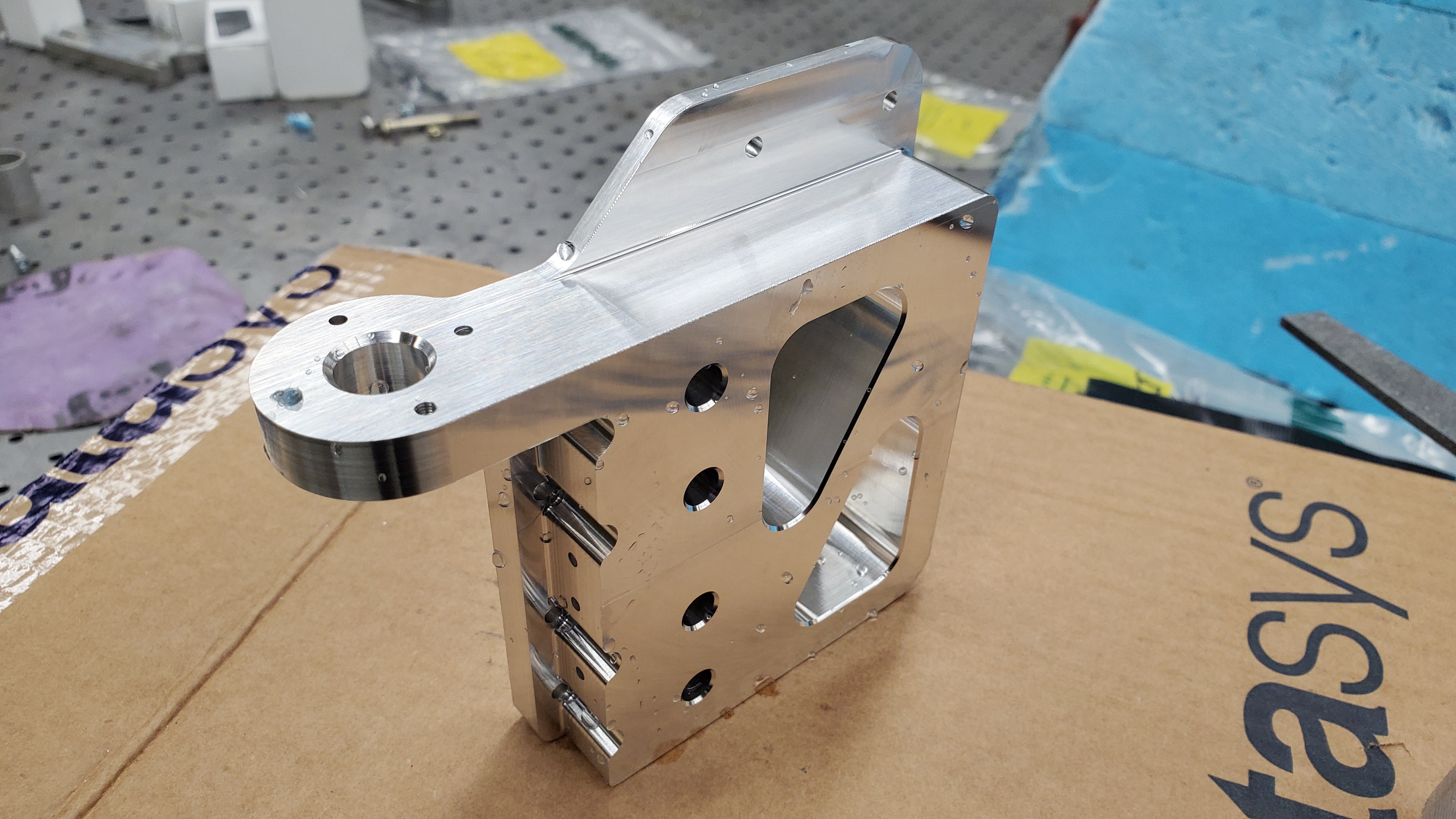
Warlock's back! Now with an improved weapon motor mounting scheme, strengthened wheel guard attachment, repacked electronics, and a welded AR400 front wedge, Warlock made its return to Norwalk in March with a record of 2 wins and 1 loss. One of the matches, in which we faced Northwestern University Robotics Club's "Jade", ended in a knockout 12 seconds into the match, after Warlock scored a devastating hit, ripping off Jade's weapon and disabling the bot. However, the forces involved in the hit were so great, that they also snapped Warlock's 3/4 in hardened steel weapon shaft.
(Read More)